西安otc焊接機器人資料陜西OTC焊接機器人編程視頻維修
產品別名 |
西安otc焊接機器人,otc焊接機器人,焊接機器人,otc機器人價格 |
面向地區 |
|
品牌 |
OTC |
用途 |
熔接 |
電流 |
交流 |
控制方式 |
數控 |
頻段 |
激光 |
驅動形式 |
自動 |
作用對象 |
金屬 |
作用原理 |
逆變 |
類型 |
其它 |
西安otc焊接機器人資料陜西OTC焊接機器人編程視頻維修
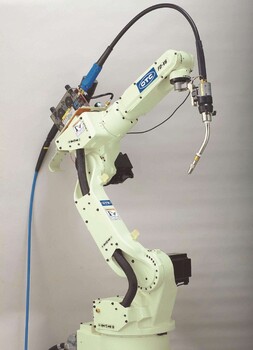
焊接機器人是從事焊接(包括切割與噴涂)的工業機器人。根據國際標準化組織(ISO)工業機器人術語標準焊接機器人的定義,工業機器人是一種多用途的、可重復編程的自動控制操作機(Manipulator),具有三個或更多可編程的軸,用于工業自動化領域。
OTC公司于1919年在日本大坂市創立,即大坂變壓器株式會社,是日本大的焊接機?機器人生產廠家,日本焊工技術水平認證考試(JIS)OTC焊機。。以中國為主向全世界40多個國家出口的世界的生產公司。是早進入中國市場銷售的焊接機?機器人生產廠家之一。
12,焊接特性自動調整功能,根據桿伸長長度和使用環境不同,自動調整焊接特性值,使實際焊接電流、電壓與設定值一致;
13,斷弧再起功能,傳統機器人焊接過程發生斷弧,機器人會緊急停止,機器人可以自動恢復到預先設定的再啟位置和再啟次數等操作。
?機器人離線編程技術的現狀
目前國際市場上已有基于普通PC機的商用機器人離線編程軟件。 如Workspace、 ROBCAD、 IGRIP等。
Workspace 是 Robot Simulations 公司開發的個商品化的基于微機的機器人仿真與離線編程軟件。該軟件新版本采用了 ACIS 作為建模核心,與一些基于微機的 CAD 系統如 AutoCAD做到了很好的數據交換。
機器人離線編程與仿真解決方案
開發基于 SolidWorks 平臺的弧焊機器人離線編程與仿真系統, 實現焊接過程中的離線編程工作。
工作流程如下:
1) 建立噴管模胎與管子的 CAD 模型及機器人模型;
2) 對焊縫進行分段并編號,并針對每一段焊縫,利用離線編程系統進行自動編程,包括焊槍軌跡的規劃、焊槍姿態的規劃;
3) 對編程結果進行仿真,并根據仿真結果對規劃的位姿進行修正;
4) 對機器人坐標系進行標定,使其與離線編程系統中的坐標系一致;
5) 將離線編程得到的程序轉換成 Motoman 機器人程序,并通過通訊接口或 CF 卡導入到機器人控制器中。
6) 機器人利用離線編制的程序完成工件的焊接
實例 1 標定
三點標定法分別用到實際工件的三個特征點的空間坐標和虛擬工件的三個特征點的空間坐標。其中,標簽點(X)為標定用坐標系的 x 軸上的一點,標簽點(Y)為標定用坐標系的 y 軸上的一點,標簽點(o)為標定用坐標系的原點位置。
進行實際機器人的示教,將機器人焊槍示教到工件的三個特征點處,記錄在三個特征點處機器人關節角的大小,保存到文件中。再將此三組機器人關節角文件改寫為機器人程序文件,然后利用“編程器”的程序上載功能上載到離線編程系統中,在“編程器”中控制機器人單步運動,每運動到一點就將機器人末端的位置記錄到相應的點中。見圖一
圖一 工件標定坐標系
此處提供了馬鞍形焊縫工件的標定功能,標定過程中需要六個標簽點,上圓三個,下圓三個。各個點的記錄方法和前面的三點標定相同,注意圓上各點的記錄順序應該相同,一般為逆時針方向。見圖二
圖二 馬鞍形焊縫工件仿真結果
實例 2 創建焊接接頭特征對象
生成焊接接頭特征對象:1)進行名稱檢查;2)進行位姿計算;目前的位姿計算只支持角焊縫,計算原理為:對于角焊縫焊縫的截面為近似倒三角形,整體近似三楞形,在兩個焊板相交的焊縫底部楞邊上生成焊接路徑點,從邊上提取空間位置信息,邊在該點的切線方向為焊縫點的 X軸方向,焊縫的兩個側面的法向方向的夾角方向為焊縫點的 Z 軸方向,Y 軸由 X,Z 叉乘得到。見圖三。
圖三 焊接接頭特征
在沒有生成焊縫幾何體的情況下,生成焊接路徑。計算原理和從焊縫幾何體生成焊縫點的原理相同。見圖四。
圖四 焊接路徑仿真結果
實例3 噴管機器人焊接仿真
圖五 噴管機器人焊接系統仿真結果
結束語
由于采用離線編程,編程時不影響焊接機器人的正常生產。而且離線編程系統可以進行自動編程, 焊槍位置點的選取及焊槍姿態的過渡會很平滑, 編程精度會提高。 編程人員通過仿真系統,能夠很直觀地檢查編程結果,并可以進行人工修正。所以采用這樣的離線編程系統,能夠提高編程效率,減輕編程員的勞動強度,提高產品的生產率及產品的焊接質量。
FD-QT激光傳感器
即使工件形狀隨意變化,焊槍的位置、姿態也可以自動調整。
100%由OTC公司開發的激光跟蹤傳感器。
■可以對應薄板的跟蹤(t1.0mm)
■可以對應不銹鋼、鋁等多種材料
■可以對應200cm/min的高速跟蹤
■跟蹤不受焊接情況的影響
■可以根據間隙大小自動調整焊接條件
查看全部介紹