





關鍵詞 |
車門限位器性能試驗,車門開度限位器性能,車門限位器中耐久試驗,大眾汽車 |
面向地區 |
全國 |
品牌 |
合肥雄強 |
加工定制 |
是 |
電源電壓 |
220v |
振動方向 |
垂直+水平 |
材質 |
鋁型材 |
工作溫度 |
其它 |
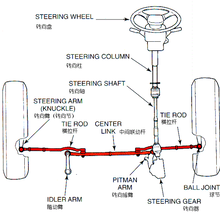
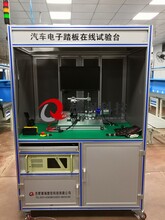
大眾汽車車門開度限位器性能試驗臺
目前,汽車車門限位器中心線生成方式多為工程師手動利用CATIA擬合的方式。主要步驟如下:步,根據設計設定限位器旋轉中心線,利用設計定義的旋轉平面確定旋轉中心點;然后依據車門鉸鏈中心線及限位器旋轉平面確定限位器繞鉸鏈中心線旋轉的中心點,根據前期設計確定限位器盒體滾子與限位器中心線接觸點;第二步,根據車門運動時限位器既繞限位器中心旋轉又繞鉸鏈中心旋轉的原理手動擬合限位器中心線形狀。
上述傳統的限位器中心線生成方式存在的不足是效率低下且生成的中心線精度低;另外上述方式便捷程度低并且對工程師的技術水平要求高,不適應目前汽車設計、便捷、智能的趨勢。

技術實現要素:
本試驗臺目的在于提供一種提高限位器中心線制作精度及效率的車門限位器中心線自動生成方法。
為實現上述目的,本發明采取下述技術方案:
本試驗臺所述車門限位器中心線自動生成方法,按照下述步驟進行:
步、利用傳統方法根據設計設定限位器旋轉中心線,利用設計定義的旋轉平面確定旋轉中心點G1,即限位器中心;然后依據車門鉸鏈中心線及限位器旋轉平面確定限位器繞車門鉸鏈中心線旋轉的中心點G2,即鉸鏈中心;根據前期設計確定限位器盒體滾子與限位器中心線接觸點G3,即輔助中心;利用CATIA軟件提取三個基準點G1、G2、G3坐標;
第二步、調用利用所述CATIA軟件中的工程函數及JAVA人機互動功能開發的基于所述三個基準點G1、G2、G3的坐標及自定義擬合次數、和車門大開啟角度的自動化限位器中心線生成工具;設定擬合次數,根據車型開發要求設定車門大開啟角度;
第三步、將所述三個基準點G1、G2、G3坐標錄入到第二步調用的所述自動化限位器中心線生成工具中,點擊創建按鈕調用自動化限位器中心線生成工具中集成的、依據限位器的運動原理編寫的CATIA工程循環函數,自動擬合生成多段限位器中心線分段輪廓,并將所述的擬合多段限位器中心線分段輪廓結合成完整的車門限位器中心線。
本試驗臺優點在于充分利用依據限位器的運動原理編寫的CATIA工程函數的集成,在依托JAVA方便的人機互動功能,有效的防止因汽車工程師手動擬合而造成的精度不足。本方法有效滿足了在開發周期內汽車車門開閉運動狀態校核需要反復擬合限位器中心線的要求,適應了汽車開發周期越來越短、換代越來越快的趨勢。

如圖1-4所示,本本試驗臺所述車門限位器中心線自動生成方法,按照下述步驟進行:
步、利用傳統方法根據設計設定限位器旋轉中心線,利用設計定義的旋轉平面確定旋轉中心點G1,即限位器中心;然后依據車門兩個鉸鏈1.1、1.2中心線2及限位器旋轉平面確定限位器繞車門兩個鉸鏈中心線2旋轉的中心點G2,即鉸鏈中心;根據前期設計確定限位器盒體3滾子與限位器中心線接觸點G3,即輔助中心;利用CATIA軟件提取三個基準點G1、G2、G3坐標;
第二步、調用利用所述CATIA軟件中的工程函數及JAVA人機互動功能開發的基于所述三個基準點G1、G2、G3的坐標及自定義擬合次數、和車門大開啟角度的自動化限位器中心線生成工具;設定擬合次數,根據車型開發要求設定車門大開啟角度;
第三步、將所述三個基準點G1、G2、G3坐標錄入到第二步調用的所述自動化限位器中心線生成工具中,點擊創建按鈕調用自動化限位器中心線生成工具中集成的、依據限位器的運動原理編寫的CATIA工程循環函數,自動擬合生成多段限位器中心線分段輪廓,并將所述的擬合多段限位器中心線分段輪廓結合成完整的車門限位器中心線4。
公司介紹(雄鷹展翅飛強! 合肥雄強科技公司歡迎您!)
合肥雄強數控科技有限公司是一家以自主創新能力為核心競爭力的高新技術企業。是國內從事汽車、摩托車檢測設備、包裝設備、機器人、 生產線裝備線的研發、生產、銷售與服務為一體的現代化高科技創新企業。
公司座落于中國科教名城—合肥,匯集了一批機械設計、電氣設計、氣動與液壓設計、自動控制、傳感器、計算機軟件開發等高技術高素質的專業人才。并攜手中國科技大學、合肥工業大學機械與汽車工程學院、中科院合肥分院等科研單位,長期聘任其教授為公司技術顧問。以強大的技術力量,務實高效的工作能力,為國內外企業提供高質量,高精度的產品與技術服務。
公司以真誠求市場,以技術得認可,以創新共發展,以質量贏口碑,為每一位客戶提供可靠的產品和合理的方案。富有團隊精神的雄強人將以嚴謹的工作態度和艱苦的創業精神,加快創新、追求卓越。雄強公司愿與您攜手同行,開拓進取,共創輝煌!