
智能物流是一種的物聯網技術現已廣泛應用于工業上的分揀、包裝、裝卸 、搬運、裝配等環節,隨著機器人技術的快速發展,用機器人來替代人進行工作,不但可以節約人力成本和減少搬運不當對人造成的傷害,而且可以提高工作效率和質量。
本文創新性地集成了自動化立體倉庫、AGV、復合機器人及雙臂機器人等智能設備,設計了一套智能機器人倉儲物流系統,同時開發了總控調度軟件,實現了各設備的穩定立有序運行。針對AGV定位不準確的問題,本文提出一種二維碼視覺定位方法,從而提高了倉儲物流系統的穩定性。

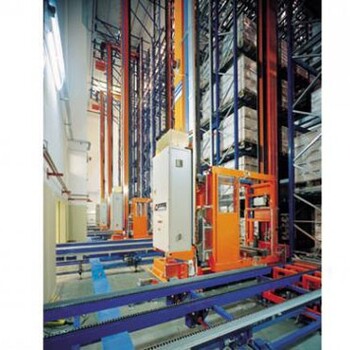
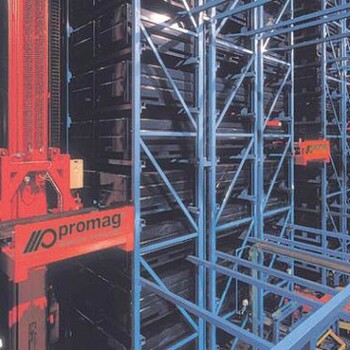
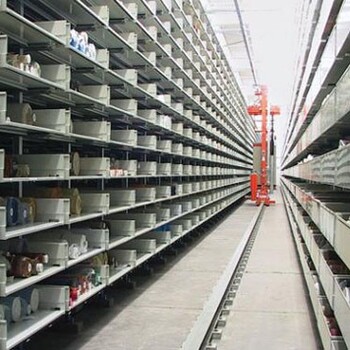
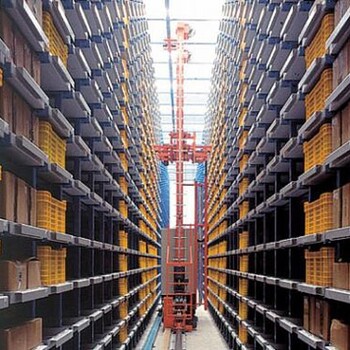
圖1為本文設計的智能機器人倉儲物流系統總體方案,其集成了自動化立體倉庫、AGV、機器人、視覺傳感器、激取光料傳感器等,由機器人完成物料的拾取、擺放、搬運和分撿,視覺系統完成對物料的形狀、位置和顏色識別,傳感器完成移動機器人的定位和避障等,該系統實現了齒輪箱的裝配和拆解工作,其適用性廣,衍生能力強。設計齒輪箱裝配工藝流程如圖2所示。
雙臂機器人雙臂機器人采用兩個7自由度柔性機械臂組成, 能夠集成化與柔性化地實現快速、安全、靈活、、高 效的旋擰、定位等全套裝配解決方案。該機器人系統配有視覺系統,具有視覺識別引導抓取功能,末端采用電控夾爪,實現對工件的穩定抓取。
綜合考慮智能機器人倉儲物流系統工作流程,機器人的轉彎半徑、工作空間、場地等多方面約束,進行智能機器人倉儲物流系統布局設計,其布局如圖7所示,圖中虛線表示叉車 AGV 的運行路線,粗實線表示復合機器人的運行路線,細實線為平臺式AGV的運行路線,兩臺平臺式AGV交替工作。復合機器人與叉車AGV在轉接臺處完成取放貨,復合機器人與平臺式AGV在轉接處完成對接。

旋轉處理模型
旋轉處理即以中心點為旋轉參考點,旋轉修正,如圖10a所示。設定P0(x0 ,y0) 為輪廓中心點坐標,B(x23 ,y23)為待修正后矩形一邊的中心點坐標, A(x'23,y'23)為修正后矩形一邊的中心點坐標。根據P0和B點坐標求得A點坐標,如式(3):

AGV經過視覺位移處理和旋轉處理,可以調節AGV當前位姿,提高AGV的定位精度,AGV與其他設備的對接可靠穩定。

天津智能貨柜
面議
產品名:貨柜

立體貨柜搬遷移機
面議
產品名:貨柜

南京MODULA摩登納貨柜維修
面議
產品名:貨柜

重慶自動貨柜保養
面議
產品名:貨柜

大連自動貨柜搬遷移機
面議
產品名:貨柜

杭州立體貨柜價格
面議
產品名:貨柜
東莞自動貨柜
面議
產品名:貨柜

智能升降貨柜電話
面議
產品名:貨柜