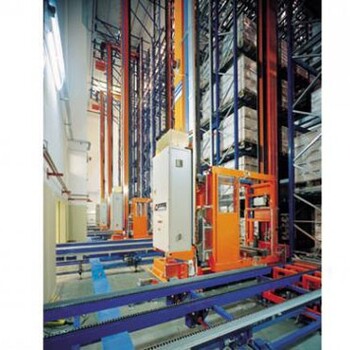

圖1為本文設計的智能機器人倉儲物流系統總體方案,其集成了自動化立體倉庫、AGV、機器人、視覺傳感器、激取光料傳感器等,由機器人完成物料的拾取、擺放、搬運和分撿,視覺系統完成對物料的形狀、位置和顏色識別,傳感器完成移動機器人的定位和避障等,該系統實現了齒輪箱的裝配和拆解工作,其適用性廣,衍生能力強。設計齒輪箱裝配工藝流程如圖2所示。
平臺式 AGV
平臺式AGV能夠實現物品的自動化可靠運輸及自動投送。其搭載激光傳感器、超聲波傳感器。基于激光SLAM的定位導航算法,結合超聲波傳感器,實現自主行走及自主避障。其控制臺可以集中調度、監控、管理 AGV 系統的運行狀態活動。

雙臂機器人雙臂機器人采用兩個7自由度柔性機械臂組成, 能夠集成化與柔性化地實現快速、安全、靈活、、高 效的旋擰、定位等全套裝配解決方案。該機器人系統配有視覺系統,具有視覺識別引導抓取功能,末端采用電控夾爪,實現對工件的穩定抓取。
智能機器人倉儲物流系統主要由總控調度軟件和立體倉庫監控軟件組成,立體倉庫監控軟件主要用于立體倉庫狀態反饋,以及零件/成品的存入和取出。 總控調度軟件負責管理和控制所有的設備, 協調各個設備進行工作,以完成整體的傳工輸作控流制程。總控調度軟件和其他跟各蹤模塊之間的關系如圖5所示。
圖5 軟件結構圖
系統中所有設備通過TCP/IP協議進行通信,如圖6所示。使用路由器組建一個局域網,雙臂機器人、立體倉庫監控軟件服務器、總控調度軟件服務器通過有線的方式介入局域網,而復合機器人、平臺式AGV、叉車AGV使用無線的方式介入局域網。在該局域網中,總控調度軟件是整個系統的核心,允許直接監視其他設備的狀態,并控制這些設備執行相應的動作。

AGV經過視覺位移處理和旋轉處理,可以調節AGV當前位姿,提高AGV的定位精度,AGV與其他設備的對接可靠穩定。

齒輪箱的裝配和拆解過程嚴格按照工藝流程執行,驗證了本文所設計的智能機器人倉儲物流系統的可靠性及穩定性。平臺式AGV與出入庫平臺的成功對接驗證了本文二維碼視覺定位的有效性及穩定性。

天津智能貨柜
面議
產品名:貨柜

立體貨柜搬遷移機
面議
產品名:貨柜

南京MODULA摩登納貨柜維修
面議
產品名:貨柜

重慶自動貨柜保養
面議
產品名:貨柜

大連自動貨柜搬遷移機
面議
產品名:貨柜

杭州立體貨柜價格
面議
產品名:貨柜
東莞自動貨柜
面議
產品名:貨柜

智能升降貨柜電話
面議
產品名:貨柜