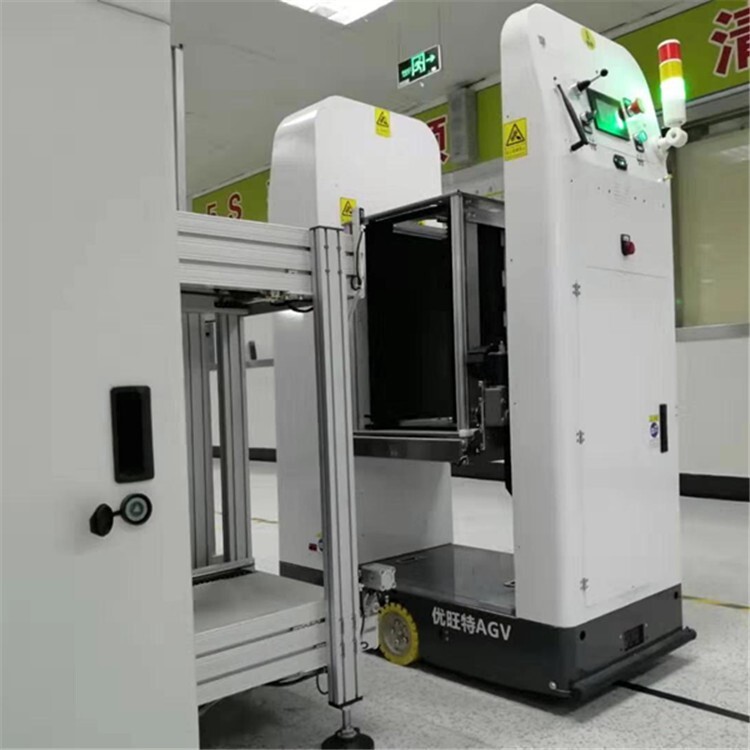
通信方式串口、WIFI(2.4/5G)驅動方式差速、舵輪、麥輪導航方式磁條、二維碼、激光安全防護激光避障控制方式單片機供電能源鋰電池組行駛方式前進后退負載重量0-5000KG爬坡性能3-5°
1973年,位于瑞典卡爾馬市的沃爾沃裝配廠著手發展異步設備裝配線,來替代傳統的傳送帶式裝配線。至此,由計算機控制的裝配型AGV數量達到了280輛。

20世紀80年代末期,無線式導引技術引入到AGV系統中,例如利用激光和慣性進行導引,這樣提高了AGV系統的靈活性和準確性,而且,當需要修改路徑時,也不必改動地面或中斷生產。這些導引方式的引入,使得導引方式更加多樣化了。

隨著電子產品和計算機軟件等高科技產品的快速發展,降低了微電腦和微電子器件的成本,毫無疑問,這對AGV的發展起到了的推動作用。AGV系統中的計算機用于存儲指令、做出判斷以及執行程序等。實際上,幾乎所有由人工控制的物料處理過程,都可以由AGV來完成。AGV能夠合理安排生產時序,保存產品清單,管理系統明細,以及控制多種類型的機械系統的所有操作。

AGV的應用從初的傳統式定向配送,迅猛地發展到擁有機器人接口的、由復雜的計算機控制的汽車裝配線領域。AGV能夠成為一個立的系統,也可以集成到其它系統中,或者成為各個相對立的自動化生產區之間的紐帶。初的AGV只用于在水平方向上搬運放在托盤上的物料,而對于AGV的設計和應用已經像工業機器人一樣多種多樣了。

市場對AGV需求量可以由AGV生產廠家的增長數量來衡量。上世紀70年代末起,美國只有不到6家AGV生產廠家,AGV的型號也不過3種。隨著對產品標準化設計的日益重視,到了1990年,全世界的AGV生產廠家達到40多個,車型也超過了15種。隨著科技的發展,將推動未來AGV的。而AGV使用數量的日益增長,反過來又促進了在AGV研發上加大投資力度。

自動導向車(AGV) 是采用自動或人工方式裝載貨物,按設定的路線自動行駛或牽引著載貨臺車至地點,再用自動或人工方式裝卸貨物的工業車輛。按日本JISD6801的定義:AGV是以電池為動力源的一種自動操縱行駛的工業車輛。自動導向車只有按物料搬運作業自動化、柔性化和準時化的要求,與自動導向系統、自動裝卸系統、通訊系統、安全系統和管理系統等構成自動導向車系統(AGVS)才能真正發揮作用。 計算機硬件技術、并行與分布式處理技術、自動控制技術、傳感器技術以及軟件開發環境的不斷發展,為AGV的研究與應用提供了必要的技術基礎。人工智能技術如理解與搜索、任務與路徑規劃、模糊與神經網絡控制技術的發展,使AGV向著智能化和自主化方向發展。AGV的研究與開發集人工智能、信息處理、圖像處理為一體,涉及計算機、自動控制、信息通訊、機械設計和電子技術等多個學科,成為物流自動化研究的熱點之一。
盡管對AGV的研究已有多年的歷史,但仍有多項關鍵技術還有待提高和突破,以進一步提高AGV的性能,降低制造成本和減少使用費用

特點
1、運行路徑和目的地可以由管理程序控制,機動能力強。而且某些導向方式的線路變更十分方便靈活,設置成本低。
2、工位識別能力和定位精度高,具有與各種加工設備協調工作的能力。在通訊系統的支持和管理系統的調度下,可實現物流的柔性控制。
3、載物平臺可以采用不同的安裝結構和裝卸方式,能滿足不同產品運送和加工的需要。因此,物流系統的適應能力強。
4、可裝備多種聲光報警系統,能通過車載障礙探測系統在碰撞到障礙物之前自動停車。當其列隊行駛或在某一區域交叉運行時,具有避免相互碰撞的自控能力,不存在人為差錯。因此,AGVS比其他物料搬運系統更安全。
5、AGV組成的物流系統不是性的,而是在給定的區域內設置。與傳統物料輸送系統在車間內固定設置且不易變更相比,該物流系統的設置柔性強,并可以充分利用人行通道和叉車通道,從而改善車間地面利用率。
6、與其他物料輸送方式相比,初期投資大,但可以大幅度降低運行費用,特別是在產品類型和工位較多時。AGV在國內限制發展的原因就是價格太貴,一般行業無法接受。

AGV在制造業的生產線中大顯身手,、準確、靈活地完成物料的搬運任務。并且可由多臺AGV組成柔性的物流搬運系統,搬運路線可以隨著生產工藝流程的調整而及時調整,使一條生產線上能夠制造出十幾種產品,大大提高了生產的柔性和企業的競爭力。1974年瑞典的Volvo Kalmar轎車裝配廠為了提高運輸系統的靈活性,采用基于AGVS為載運工具的自動轎車裝配線,該裝配線由多臺可裝載轎車車體的AGVS組成,采用該裝配線后,裝配時間減少了20%,裝配故障減小39%,投資回收時間減小57%,勞動力減小了5%。AGV在世界的主要汽車廠,如通用、豐田、克萊斯勒、大眾等汽車廠的制造和裝配線上得到了普遍應用。











