



ULVACrobot晶圓搬運機械手維修:任何工程機器人設(shè)備在出廠之時,已經(jīng)提出了該設(shè)備的日常保養(yǎng)和定期保養(yǎng)的具體內(nèi)容和要求ULVACrobot結(jié)語安川機器人保養(yǎng)是確保設(shè)備長期穩(wěn)定運行的關(guān)鍵措施油溫較高時,或者環(huán)境條件差、灰塵較多的工業(yè)機器人伺服電機要經(jīng)常清洗、換油
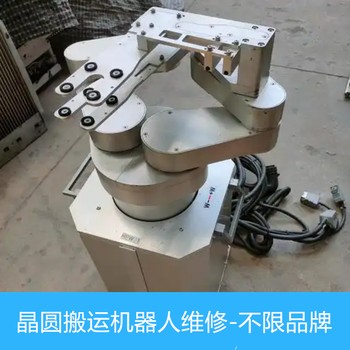
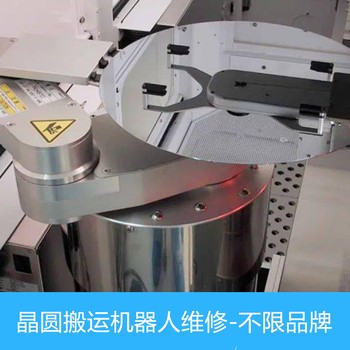
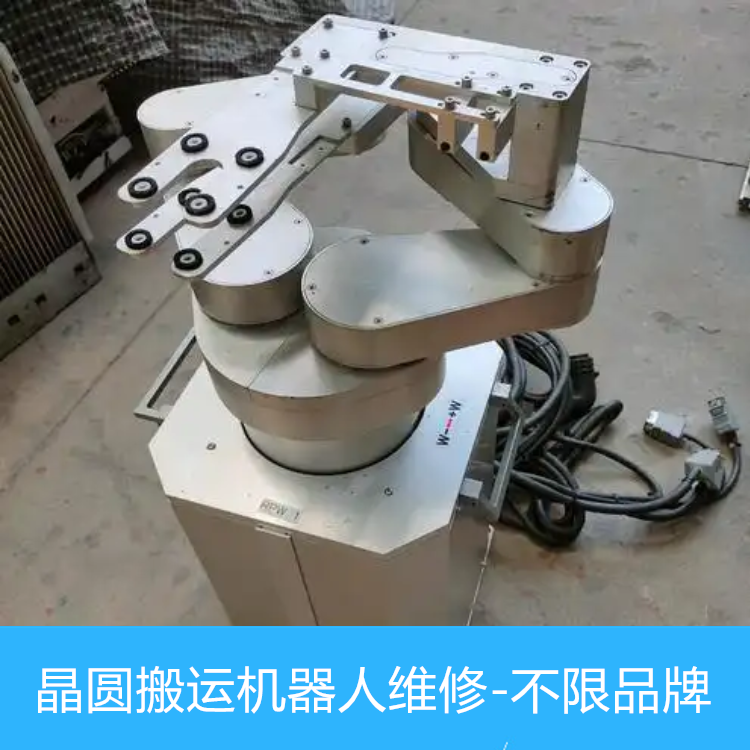
機器人在運行6000-10000小時或2年內(nèi)需要做一次性的保養(yǎng),給在運行的機器人保養(yǎng)相當重要,往往得不到公司生產(chǎn)管理者的重視,日常保養(yǎng)和定期系統(tǒng)性的保養(yǎng)能有效的減少KUKA、庫卡、ABB\發(fā)那科機器人因平時維護不到位而造成的罷工,給企業(yè)帶來重大損失要給大家揭開一款神秘機器人的面紗,它就是大名鼎鼎的“晶圓半導(dǎo)體機器人”!那這個神奇的機器人究竟肩負著怎樣的使命呢?且聽我細細道來,先帶大家認識一下晶圓半導(dǎo)體機器人吧!



所屬分類:機械設(shè)備維修/工業(yè)機械維修
本文鏈接:http://www.mygsw.com/sell/info-e529k8dpnee50c.html

力士樂rexroth伺服閥維修比例閥/伺服閥維修
699元
產(chǎn)品名:伺服閥維修,比例閥故障維修,伺服閥維修技巧,伺服閥常見故障維修
穆格伺服閥維修比例節(jié)流閥維修
699元
產(chǎn)品名:伺服閥維修,比例閥故障維修,伺服閥維修技巧,伺服閥常見故障維修

德國BOTT液壓扳手維修液壓剪維修
699元
產(chǎn)品名:液壓扳手維修,液壓扳手故障維修,液壓扳手維修技巧,液壓扳手常見故障維修

parker派克比例伺服閥維修高頻響比例換向閥維修
699元
產(chǎn)品名:伺服閥維修,伺服閥故障維修,伺服閥維修技巧,伺服閥常見故障維修

穆格比例伺服閥比例壓力閥故障維修檢測步驟
699元
產(chǎn)品名:伺服閥維修,伺服閥故障維修,伺服閥維修技巧,伺服閥常見故障維修
DANFOSS/丹佛斯比例流量閥維修旋轉(zhuǎn)直驅(qū)糾偏伺服閥維修
699元
產(chǎn)品名:伺服閥維修,伺服閥故障維修,伺服閥維修技巧,伺服閥常見故障維修
美國恩派克enerpac驅(qū)式液壓扳手維修液壓破拆工具維修
699元
產(chǎn)品名:液壓扳手維修,液壓扳手故障維修,液壓扳手維修技巧,液壓扳手常見故障維修

美國Mcville麥克維爾羅茨真空泵啟動困難維修技術(shù)指導(dǎo)
688元
產(chǎn)品名:真空泵維修,真空泵故障維修,進口真空泵維修,真空泵修理講解