




測試傳感器系統,包括深度傳感器、障礙物傳感器等。深度傳感器要能夠準確測量機器人在水下的位置,避免機器人碰撞涵箱或橋洞底部和頂部;障礙物傳感器則要能夠及時檢測到周圍的障礙物,如橋洞內的橋墩等,以便機器人及時避讓。
清淤方式的選擇與控制
根據淤泥的情況合理選擇清淤方式。如果淤泥比較松軟,可直接采用吸泥方式,通過機器人的大功率吸泥泵將淤泥吸入儲存罐。在吸泥過程中,要控制吸泥口的位置和角度,確保能夠大程度地吸取淤泥。例如,將吸泥口貼近淤泥堆積較多的底部和角落。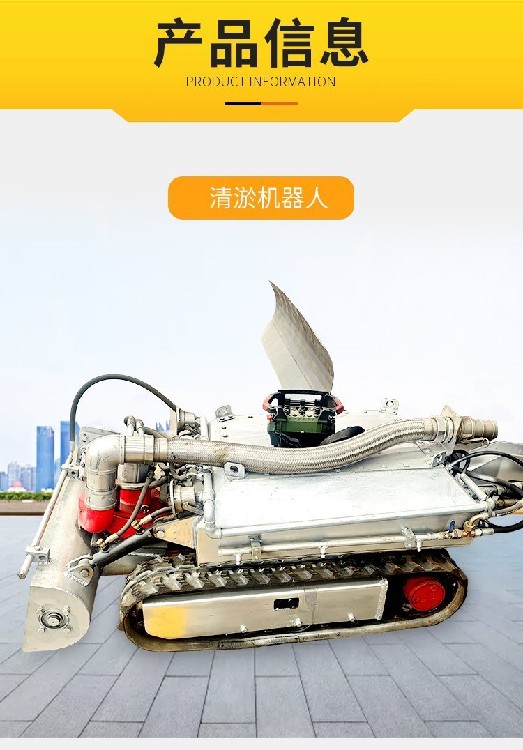
清淤機器人通常由水下推進器、控制系統、機械臂、吸泥裝置和傳感器等部分組成。其工作原理主要基于自動化控制和機器人技術,通過預設程序或遠程控制,使機器人完成一系列水下作業任務。具體而言,清淤機器人依靠推進器在水中移動,并使用傳感器探測淤泥的位置和厚度。然后,通過機械臂或吸泥裝置將淤泥清除,并運送到位置。

潛水式清淤機器人
潛水式清淤機器人主要用于河道、水庫等水域,通過潛水的方式在河底進行清淤作業。這些機器人通常配備攝像頭和聲吶等傳感設備,具備水下導航能力,可以自主或遙控操作.
潛水式清淤機器人適用于較深的水域,操作靈活,能夠清理河道底部的淤泥,但其適用范圍相對有限,主要適用于清水區域。

考慮清淤方式。對于粘度較大的淤泥,可以選擇帶有強力攪拌裝置的機器人,將淤泥打散后再進行吸取;對于含有較多固體雜物的淤泥,機器人應配備有效的切割或粉碎裝置,以防止堵塞吸泥管道。
機器人的動力系統要適應工作環境。如果工作區域離電源較遠,可選用自帶大容量電池或燃油發動機的機器人,以足夠的工作時間。
自主避障系統
清淤機器人配備了多種避障傳感器和算法,能夠自動識別并避開障礙物,確保作業的安全和.自主避障系統提高了清淤機器人的適應性和安全性,但需要應對復雜地形的挑戰。

螺旋式清淤機器人
螺旋式清淤機器人采用螺旋推進器作為行走機構,能夠在各種復雜地形中穩定行駛,包括沼澤、水網地帶、河床、灘涂等半流體狀態的路面.螺旋式清淤機器人特別適用于環境惡劣的區域,如化工廠和石油廠的儲罐、管道等設備清淤,但其推進效率相對較低。

設備調試與檢查
在正式清淤之前,要對清淤機器人進行全面調試。檢查機器人的各個關節、機械臂的靈活性,確保其能夠正常伸展和收縮。例如,清淤機器人的吸泥管需要能夠在一定角度范圍內自由轉動,以適應不同位置的淤泥吸取。
作業:清淤機器人可以在水下連續工作,不受時間、天氣和環境條件限制3。同時,其配備的吸泥裝置、機械臂等能夠快速清理大面積的淤泥,顯著提高作業效率3。
安全性強:清淤機器人自動化程度高,減少了人工參與的風險3。特別是在危險環境中,如含有污染物的化工廠、污水處理廠,以及存在塌方、水流沖擊等風險的區域,機器人可以有效避免工人受傷或設備損壞36。

普洱隧道掘進破石設備
1980元
產品名:巖石分裂棒
泰安劈裂棒跟氣體比較
2300元
產品名:靜態破石設備

內江挖光伏鉆機出租廠家聯系方式
2350元
產品名:挖改隧道鉆機

河源隧道靜態爆破施工設備
2380元
產品名:隧道水磨鉆施工隊

河源基坑挖掘劈裂棒廠家
2680元
產品名:愚公斧劈裂棒出租

北京愚公劈裂棒出租聯系方式
2980元
產品名:巖石劈裂棒

保定礦石打孔鉆機廠家聯系方式
6980元
產品名:挖機安裝鉆機
固原隧道掘進打孔鉆機聯系方式
6980元
產品名:挖改潛孔鉆機