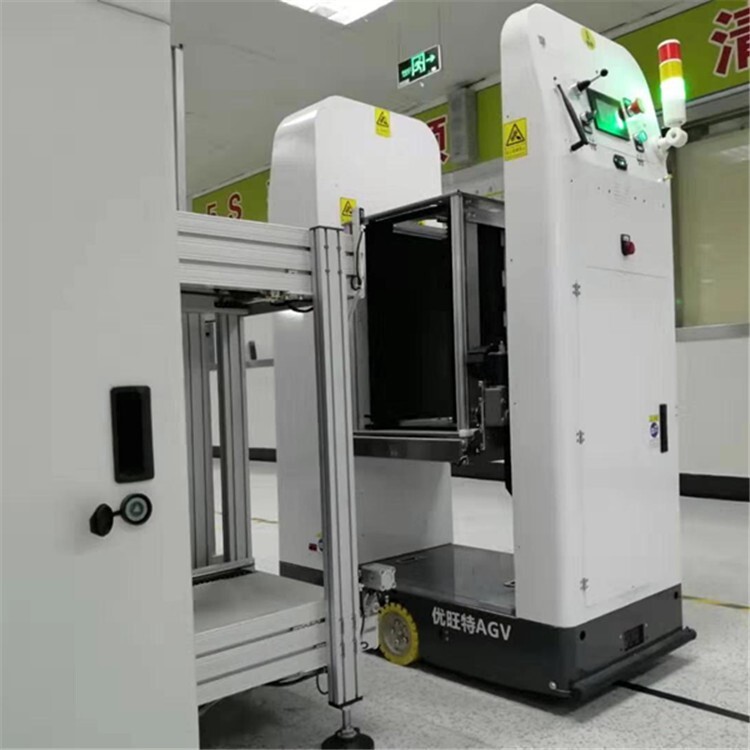
驅動方式差速、舵輪、麥輪控制方式單片機導航方式磁條、二維碼、激光行駛方式前進后退通信方式串口、WIFI(2.4/5G)供電能源鋰電池組爬坡性能3-5°安全防護激光避障負載重量0-5000KG
AGV扮演物料運輸的角色已經50多年了。輛AGV誕生于1953年,它是由一輛牽引式拖拉機改造而成的,帶有車兜,在一間雜貨倉庫中沿著布置在空中的導線運輸貨物。到上世紀五十年代末到六十年代初期時,已有多種類型的牽引式AGV用于工廠和倉庫。

1973年,位于瑞典卡爾馬市的沃爾沃裝配廠著手發展異步設備裝配線,來替代傳統的傳送帶式裝配線。至此,由計算機控制的裝配型AGV數量達到了280輛。
AGV上的傳感器將根據信號的強度,選擇某一頻率的電磁信號為AGV提供導引。這項技術在地面埋設多條導線來處理交叉點或其它操作點。系統將給導線施加一定的電壓,使AGV按照預定的路徑行駛。例如,在一個交叉點設置3條立的導線。

這些代的導航電路在安裝上的花費是昂貴的。因為在AGV所行駛的路徑上都需要在地面上開槽,而且在彎道處,開槽的軌跡符合AGV的轉彎半徑。很多系統都需要埋設4條導線——3條用于導航,1條用于通信。另外,導線中的導航信號經常會受到周圍的鋼筋或電子信號的干擾。

AGV的應用從初的傳統式定向配送,迅猛地發展到擁有機器人接口的、由復雜的計算機控制的汽車裝配線領域。AGV能夠成為一個立的系統,也可以集成到其它系統中,或者成為各個相對立的自動化生產區之間的紐帶。初的AGV只用于在水平方向上搬運放在托盤上的物料,而對于AGV的設計和應用已經像工業機器人一樣多種多樣了。

充電自動化
當AGV小車的電量即將耗盡時,它會向系統發出請求指令,請求充電(一般技術人員會事先設置好一個值),在系統允許后自動到充電的地方“排隊”充電。
另外,AGV小車的電池壽命很長(2年以上),并且每充電15分鐘可工作4h左右。

特點
1、運行路徑和目的地可以由管理程序控制,機動能力強。而且某些導向方式的線路變更十分方便靈活,設置成本低。
2、工位識別能力和定位精度高,具有與各種加工設備協調工作的能力。在通訊系統的支持和管理系統的調度下,可實現物流的柔性控制。
3、載物平臺可以采用不同的安裝結構和裝卸方式,能滿足不同產品運送和加工的需要。因此,物流系統的適應能力強。
4、可裝備多種聲光報警系統,能通過車載障礙探測系統在碰撞到障礙物之前自動停車。當其列隊行駛或在某一區域交叉運行時,具有避免相互碰撞的自控能力,不存在人為差錯。因此,AGVS比其他物料搬運系統更安全。
5、AGV組成的物流系統不是性的,而是在給定的區域內設置。與傳統物料輸送系統在車間內固定設置且不易變更相比,該物流系統的設置柔性強,并可以充分利用人行通道和叉車通道,從而改善車間地面利用率。
6、與其他物料輸送方式相比,初期投資大,但可以大幅度降低運行費用,特別是在產品類型和工位較多時。AGV在國內限制發展的原因就是價格太貴,一般行業無法接受。

近年來,作為CIMS的基礎搬運工具,AGV的應用深入到機械加工、家電生產、微電子制造、卷煙等多個行業,生產加工領域成為AGV應用廣泛的領域。

在郵局、圖書館、碼頭和機場等場合,物品的運送存在著作業量變化大,動態性強,作業流程經常調整,以及搬運作業過程單一等特點,AGV的并行作業、自動化、智能化和柔性化的特性能夠很好的滿足上式場合的搬運要求。瑞典于1983年在大斯得哥爾摩郵局、日本于1988年在東京多摩郵局、中國在1990年于上海郵政樞紐開始使用AGV,完成郵品的搬運工作。在荷蘭鹿特丹港口,50輛稱為“yard tractors”的AGV完成集裝箱從船邊運送到幾百碼以外的倉庫這一重復性工作。













