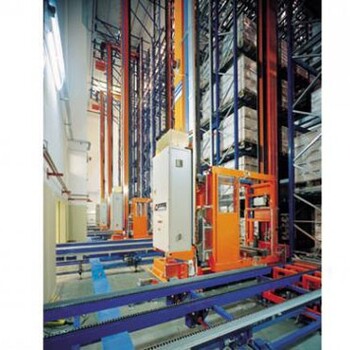

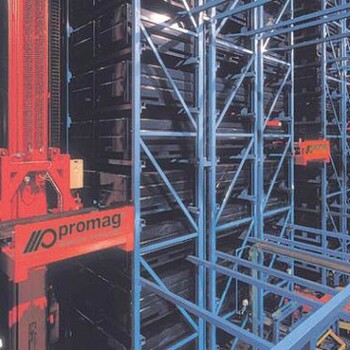
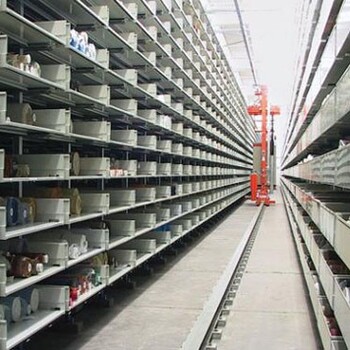
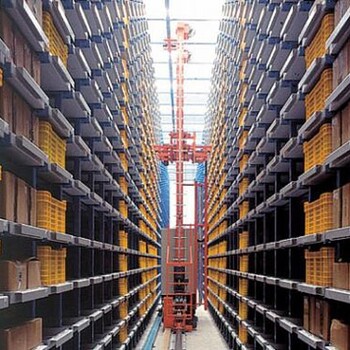
圖1為本文設計的智能機器人倉儲物流系統(tǒng)總體方案,其集成了自動化立體倉庫、AGV、機器人、視覺傳感器、激取光料傳感器等,由機器人完成物料的拾取、擺放、搬運和分撿,視覺系統(tǒng)完成對物料的形狀、位置和顏色識別,傳感器完成移動機器人的定位和避障等,該系統(tǒng)實現(xiàn)了齒輪箱的裝配和拆解工作,其適用性廣,衍生能力強。設計齒輪箱裝配工藝流程如圖2所示。
設計開發(fā)自動化立體倉庫其管理系統(tǒng)具有貨物入庫、貨物出庫、入/出庫人工修正、庫存盤點、設備狀態(tài)查詢及設備故障記錄等功能,可以自動記錄設備故障信息,包括設備編碼、故障時間、故障類別、故障說明等,在故障排除后由操作員在該記錄中填寫排除時間信息,并且可以按照設備編碼、故障類別等進行設備故障記錄查詢,查詢結(jié)果以列表形式顯示在計算機屏幕上,并可以打印輸出。
復合機器人復合機器人由移動底盤及關節(jié)柔性機械臂組成。其整體融入視覺系統(tǒng)、多樣化的導航配置、的二次視覺定位等技術,使機器人精度更高、更加智能化。可以廣泛應用于3C行業(yè)、自動化工廠、倉儲分揀、自動化貨物超市等,實現(xiàn)物料自動搬運、物品上下料、物料分揀等。
雙臂機器人雙臂機器人采用兩個7自由度柔性機械臂組成, 能夠集成化與柔性化地實現(xiàn)快速、安全、靈活、、高 效的旋擰、定位等全套裝配解決方案。該機器人系統(tǒng)配有視覺系統(tǒng),具有視覺識別引導抓取功能,末端采用電控夾爪,實現(xiàn)對工件的穩(wěn)定抓取。
叉車 AGV叉車AGV具有激光導引系統(tǒng)、控制臺和調(diào)度管理系統(tǒng)、在線自動充電系統(tǒng)、通訊系統(tǒng)及安全系統(tǒng)等。控制臺和調(diào)度管理系統(tǒng)是AGV系統(tǒng)的調(diào)度管理中心,負責與上位機交換信息,生成AGV的運行任務,并將指令下發(fā)給AGV完成相應的任務。
旋轉(zhuǎn)處理模型
旋轉(zhuǎn)處理即以中心點為旋轉(zhuǎn)參考點,旋轉(zhuǎn)修正,如圖10a所示。設定P0(x0 ,y0) 為輪廓中心點坐標,B(x23 ,y23)為待修正后矩形一邊的中心點坐標, A(x'23,y'23)為修正后矩形一邊的中心點坐標。根據(jù)P0和B點坐標求得A點坐標,如式(3):

天津智能貨柜
面議
產(chǎn)品名:貨柜

立體貨柜搬遷移機
面議
產(chǎn)品名:貨柜

南京MODULA摩登納貨柜維修
面議
產(chǎn)品名:貨柜

重慶自動貨柜保養(yǎng)
面議
產(chǎn)品名:貨柜

杭州立體貨柜價格
面議
產(chǎn)品名:貨柜

大連自動貨柜搬遷移機
面議
產(chǎn)品名:貨柜
東莞自動貨柜
面議
產(chǎn)品名:貨柜

智能升降貨柜電話
面議
產(chǎn)品名:貨柜