




關鍵詞 |
智能裝車系統電話,吉林智能裝車系統,智能裝車系統價格,智能裝車系統結構 |
面向地區 |
全國 |
靈活機械手適配多種車型
機械手移動距離優化,滿足各種車型,平板車、低欄車、高欄車。
停車引導及位置偏差自適應
當車輛出現水平偏差,裝車機通過碼垛小車自適應行走偏移量,彌補停車位的偏差。
3D視覺定位碼垛更精細
通過自研3D視覺傳感器+抓取算法,根據點云信息實現抓取和碼垛。
真空泵吸取不依賴現場氣源
大包起重抓取,吸抱一體速度快且不掉包具有柔性緩沖,防止袋包損壞。
采用3D視覺定位抓取,碼垛精細,單機械臂碼垛效率每小時可達1000件。
可視化
行業的軟硬件產品,碼垛流程可視化管理,保障裝車系統安全運作。
解決方案一:移動式
>>>帶滑軌多關節機械手+傳輸帶
作業流程:
Step1:車輛停在區域,傳感器檢測到位
Step2:人工啟動或一卡通啟動設備
Step3:3D視覺傳感器識別車輛信息,規劃庫位
Step4:3D相機輔助機械臂抓取至傳送帶
Step 5:傳送帶運輸
Step6:袋包自動抖平清灰
Step7:相機定位識別機械手夾抱物料
Step8:重復Step4~7裝載碼垛
Step9:滿車開走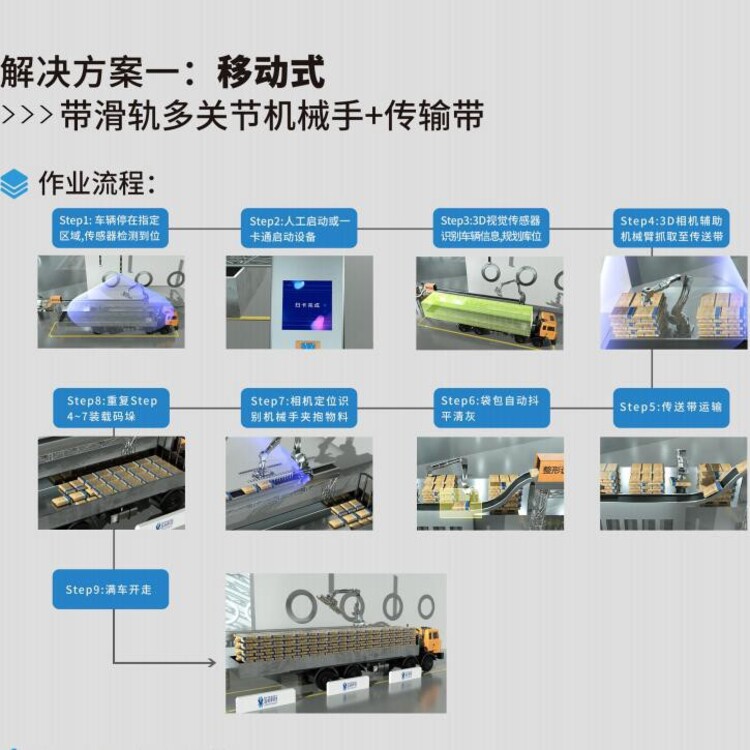
袋包橫豎交疊自動碼垛算法與云計算
1、垛形算法
裝車預警--判斷能否裝
裝車方案--解決如何裝
裝車執行—實現怎么裝
2、垛形設計
基本垛形適應不同車型
橫豎包交錯,包間互相交疊
防遛包
垛形隨高度作塔形算法
停車引導及位置偏差自適應
角度停偏
當車輛出現角度偏差,裝車 機通過激光掃描得出的角度偏差,以及車 身長寬高來計算偏差遞增量,電控根據給 出的遞增量,在容許偏差單邊15cm內來 進行碼垛計算。

全國智能裝車系統熱銷信息











