






產(chǎn)品別名 |
AGV智能導(dǎo)引車,AGV小車供應(yīng)商,AGV智能運輸車廠家 |
面向地區(qū) |
全國 |
在國內(nèi)AGV的技術(shù)來源有兩種模式:一種是引進技術(shù);一種是自有知識產(chǎn)權(quán)的技術(shù)。兩種模式目前都涵蓋AGV的所有技術(shù),技術(shù)水平并無多大差別。引進技術(shù)主要是瑞典NDC的AGV控制系統(tǒng)技術(shù),據(jù)了解NDC目前在國內(nèi)現(xiàn)有3家合作伙伴。
我國AGV發(fā)展歷程較短,但一直以來不斷加大在這一領(lǐng)域的投入,以改變我國AGV長期依賴進口的局面。經(jīng)過不懈地努力終于取得了一定的成效,北京起重運輸機械研究所、清華大學(xué)、中國郵政科學(xué)院郵政科學(xué)研究規(guī)劃院、中國科學(xué)院沈陽自動化所、大連組合機床研究所、科技大學(xué)和華東工學(xué)院都在進行不同類型的AGV的研制并小批投入生產(chǎn)。
1960年歐洲就安裝了各種形式、不同水平的AGVS220套,使用了AGV1300多臺。到了70年代中期,由于微處理器及計算機技術(shù)的普及,伺服驅(qū)動技術(shù)的成熟促進了復(fù)雜控制器的改進,并設(shè)計出更為靈活的AGV。1973年,瑞典VOLVO公司在KALMAR轎車廠的裝配線上大量采用了AGV進行計算機控制裝配作業(yè),擴大了AGV的使用范圍。70年代末,歐洲約裝備了520個AGV系統(tǒng),共有4800臺小車,1985年發(fā)展到10000臺左右。其應(yīng)用領(lǐng)域分布為:汽車工業(yè)(57%),柔性制造系統(tǒng)FMS(8%)和柔性裝配系統(tǒng)FAS(44%).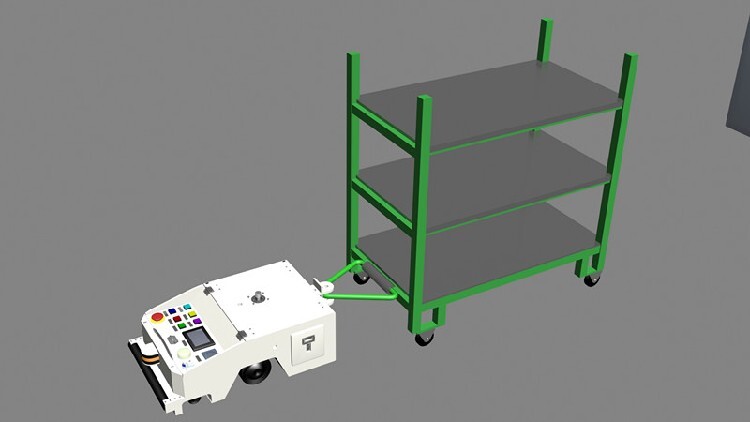
世界上臺AGV是由美國Barrett電子公司于20世紀50年代初開發(fā)成功的,它是一種牽引式小車系統(tǒng),可十分方便地與其他物流系統(tǒng)自動連接,顯著地提高勞動生產(chǎn)率,地提高了裝卸搬運的自動化程度。1954年英國早研制了電磁感應(yīng)導(dǎo)向的AGV,由于它的顯著特點,迅速得到了應(yīng)用和推廣。
自動導(dǎo)引運輸車--AGV(Automated Guided Vehicle)是指裝備有電磁或光學(xué)等自動導(dǎo)引裝置,能夠沿規(guī)定的導(dǎo)引路徑行駛,具有安全保護以及各種移載功能的運輸車,AGV屬于輪式移動機器人(WMR――Wheeled Mobile Robot)的范疇。工業(yè)應(yīng)用中不需駕駛員的搬運車,以可充電之蓄電池為其動力來源。一般可透過電腦來控制其行進路線以及行為,或利用電磁軌道(electromagneticpath-followingsystem)來設(shè)立其行進路線,電磁軌道黏貼于地板上,無人搬運車(Driverless)則依循電磁軌道所帶來的訊息進行移動與動作的運輸車。
電磁感應(yīng)式:也就是我們常見的磁條導(dǎo)航,通過在地面黏貼磁性膠帶,AGV自動搬運車經(jīng)過時車底部裝有電磁傳感器會感應(yīng)到地面磁條地標從而實現(xiàn)自動行駛運輸貨物,站點定義則依靠磁條極性的不同排列組合設(shè)置。
———— 認證資質(zhì) ————
最近來訪記錄







